1947–2022 – Selbstfahrende Mähdrescher
Ernährung der Weltbevölkerung
Die Entwicklung des selbstfahrenden Mähdreschers hat die Art und Weise verändert, wie die Ernährung der Welt gesichert wird. Mit John Deere Mähdreschern wird heute weltweit mehr als die Hälfte des Getreides geerntet. Die Erfolgsgeschichte vom Modell 55 bis zur Serie X ist eine Geschichte der technischen Innovation sowie des hochwertigen Kundendiensts über ein Netzwerk professioneller Vertriebspartner.





1954 – Hangmähdrescher
Der selbstausgleichende 55H wurde mit der Kompetenz von John Deere für Hangmähdrescher gebaut, die ihren Ursprung im von Pferden gezogenen Modell 36B aus dem Jahr 1936 hat. Marketingfilme bewarben viele Funktionen, die heutige Fahrer wiedererkennen werden: ‘Ein-Finger’-Servolenkung, leistungsstarke Scheibenbremsen und Fahrantrieb mit variabler Geschwindigkeit.

1963 – Laufketten
Die frühen Laufketten wurden aus Baufahrzeugen entwickelt. Ihre Stahlplatten benötigten regelmäßige Schmierung und die Geschwindigkeit auf der Straße war niedrig. Hier sieht man sie im Einsatz bei der Reisernte in Italien. Sie weisen das vertraute dreieckige Profil der heutigen Laufketten auf, es dauerte jedoch mehr als 40 Jahre, bevor zuverlässige Gummilaufketten zur Verfügung standen.
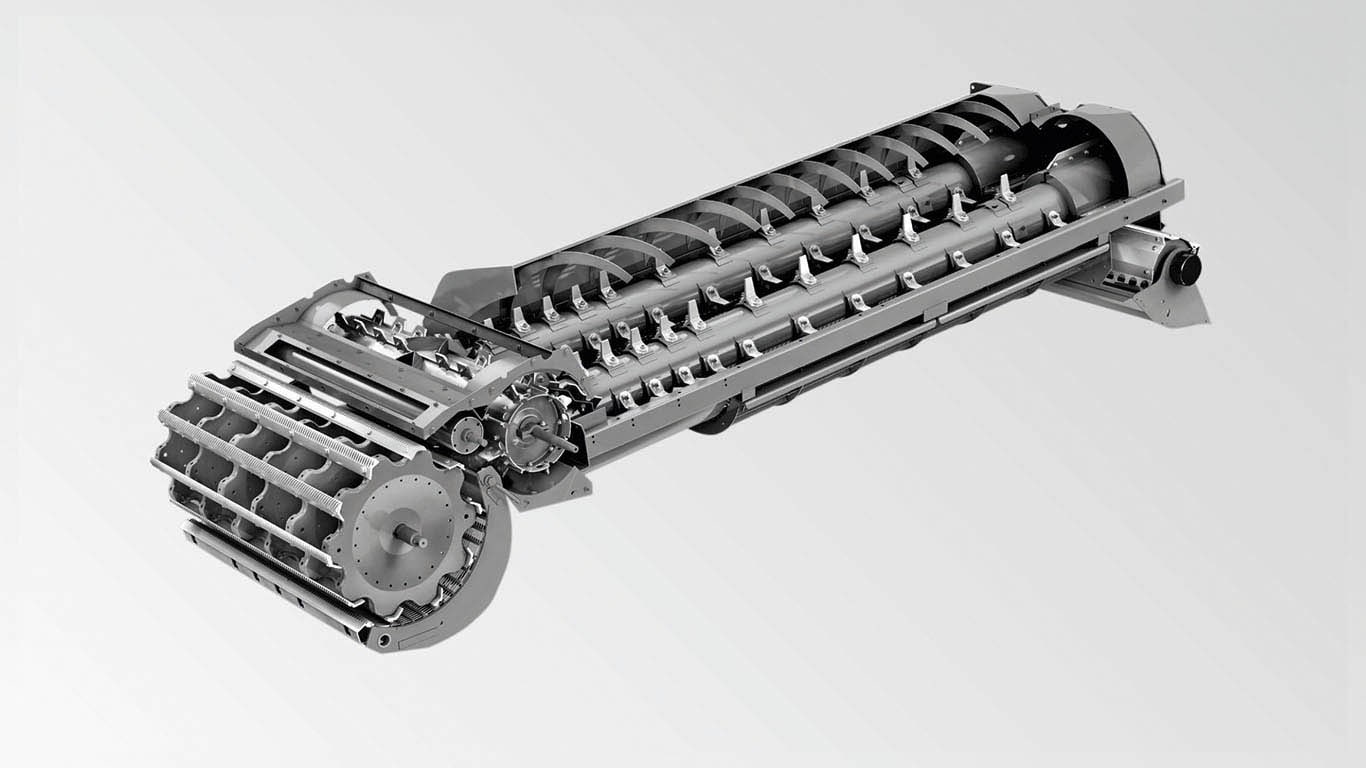
1992 – Der erste Hybridmähdrescher der Welt
Die CTS Mähdrescher verfügten über eine Dreschtrommel mit anschließender Zuführtrommel zu den zwei konkaven Separationsrotoren welche die Restkornabscheidung übernahmen. Bis 1996, als das Patent auslief, war es der einzige Hybridmähdrescher der Welt. Der kompakte Aufbau bot außergewöhnlichen Durchsatz und wird in Asien weiterhin für die Reisernte verkauft.

1999 – Greenstar 1-Display
Da es über Parallelführungssystem verfügte, musste der Fahrer sich sehr konzentrieren, den Mähdrescher auf der Mittellinie zu halten. Erst die Einführung von AutoTrac im Jahr 2002 ermöglichte ein wirklich freihändiges Lenksystem. Das Display verfügte auch über Harvest Monitor und Ertragskartierungssoftware. Viele von ihnen sind heute immer noch in Gebrauch.
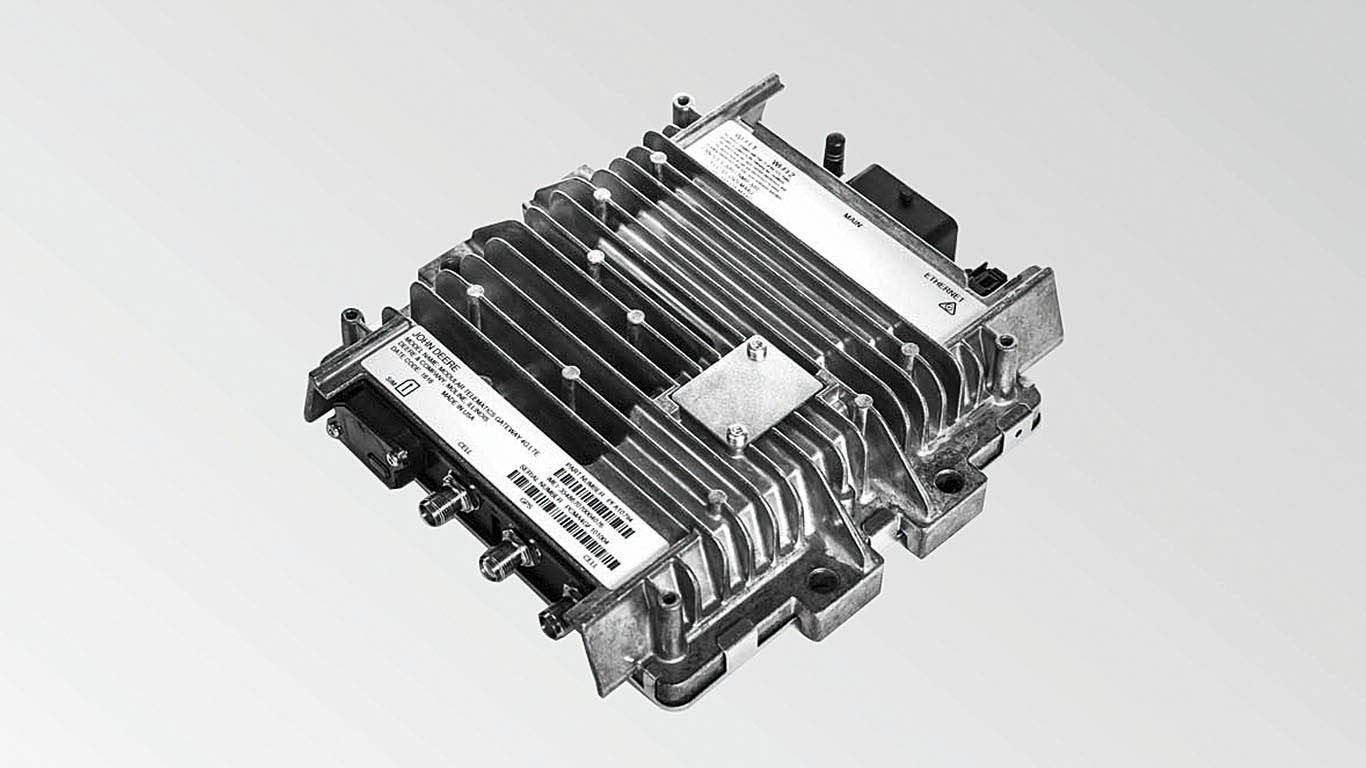
2006 – Drahtlose Maschinenkommunikation
Bei frühen Mähdrescherflotten wurden Flaggen verwendet, um zu signalisieren, welcher Mähdrescher entladen werden musste. Dann folgten Kurzwellenfunk und Mobiltelefone. Die Einführung von elektronischen Steuerungssystemen und dem MTG um einfache und direkte Maschinenkommunikation zu ermöglichen ist eine der wegweisenden Ernteinnovationen der letzten 20 Jahre. Es überträgt Echtzeitdaten zur Maschinenleistung und Positionierung für die Fernüberwachung. Es hat die Aufgabenplanung und Erntelogistik stark verändert.

2010 – Der 500.000. Mähdrescher
Greg Briggs aus Cisco, Illinois nahm am 20. Mai 2010 die Lieferung des 500.000. John Deere-Mähdreschers, eines 9870 STS, entgegen. Das Rotordreschwerk war eine grundlegende Abkehr vom herkömmlichen Schüttlersystem und so erfolgreich, dass es sich bis heute in den Mähdreschern der Serie-S gehalten hat – des beliebtesten Mähdreschers der Welt.

75 Jahre Innovation
Sehen Sie sich die Mähdrescher der Vergangenheit im Einsatz an, sowie die wichtigsten Meilensteine, die die Produktivität bei der Ernte auf ein neues Niveau gehoben und die Ernährung von heute 7,8 Milliarden Menschen möglich gemacht haben.
-

1947 – Modell 55
-

1964 – 330/430
-

1964 – 530/630/730
-

1972 – Serie 900/905
-

1987 – Serie 1100
-

1992 – Serie 2000
-

1998 – Serie CTS
-

2007 – Serie T
-

2007 – Serie S
-

2020 – Serie X

Schnellvorlauf in die Zukunft
Finden Sie heraus, was eine Aufrüstung auf unsere neuesten Mähdrescher für Sie bewirken kann.